














2020年11月24日4时30分,大力士长征五号运载火箭,成功将重达8.2吨的嫦娥五号月球探测器一举送入近地点约200公里、远地点约40万公里的地月转移轨道,嫦五即将开始历时23天的探月之旅。这是中国探月工程第六次任务,这也是我国航天领域迄今最复杂、难度最大的任务之一。在这项任务中,国防科技大学科研团队参与了多个重要项目的设计与研制,为嫦五完成探月任务贡献出科大力量。
为嫦五“挖土”装上“慧眼”
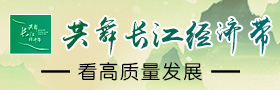
嫦娥五号奔月成功,即将开启“挖土”之旅,中国将实现首次机械臂表层月壤自主采样。
在整个“挖土”过程中,机械臂及末端采样器既要避免与月面岩石障碍物或探测器本身发生碰撞,还要能够高效精确地完成采样、放样、抓罐、放罐等关键操作。于起峰院士课题组创造性地设计出了基于视觉引导的月面采样位姿测量方案,相当于给执行任务的机械臂装上一双“慧眼”。

由于在已有的月球采样返回任务中没有使用摄像测量技术的先例可循,这给该方案的设计带来了极大的挑战。此外,月面成像环境极其恶劣:月昼温度可高达150℃,月夜下降到近零下180℃,再加上光照和辐射变幻莫测,这让传统的摄像测量方法难以适用。
为了保证该项任务能够圆满完成,实验室团队成员长期去到北京航天某所,埋头于月面环境模拟实验室中,紧抠技术上的点滴细节,力争在每一个环节上都做到精益求精,终于设计研发出了一套月壤表层采样机械臂视觉引导系统,并且成功通过了嫦娥五号初样和正样的研制测试。实验室团队成员还将在下个月奔赴北京担负起嫦娥五号的月面采样地面保障任务,力保该项任务万无一失!
为嫦五回“家”保驾护航
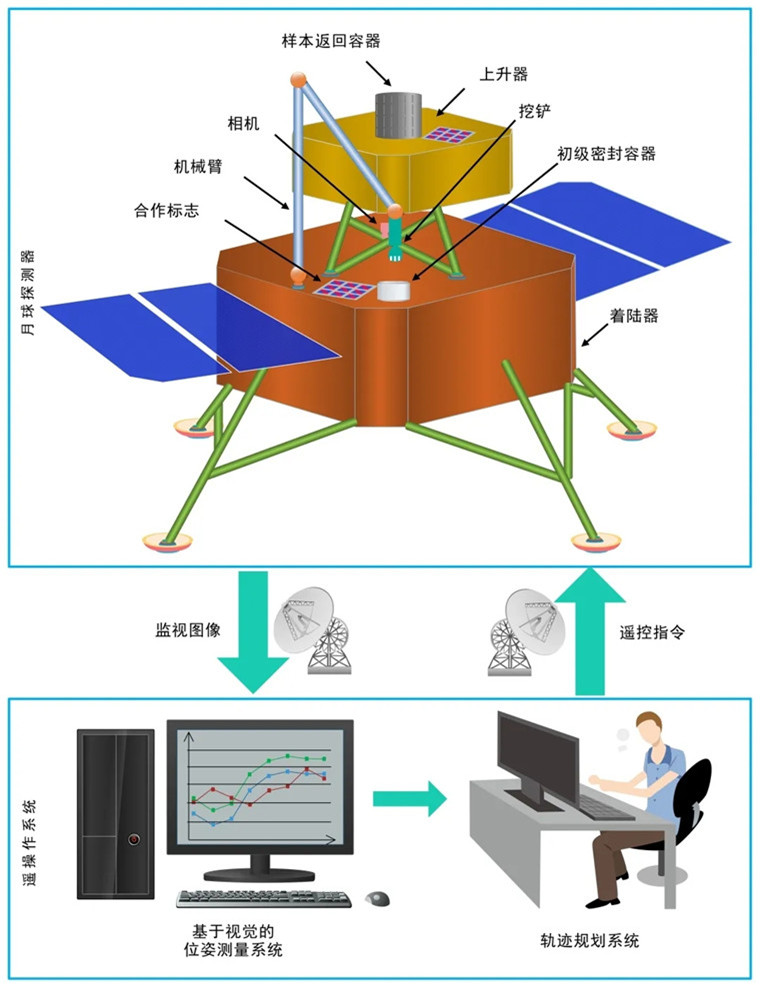
“嫦五”此行的一大任务是,获取月球样品返回地球。作为我国首次月球采样返回任务,有望为“绕、落、回”三步走发展战略画上圆满的句号。因此嫦娥五号的“硬件”极其复杂,它由轨道器、返回器、着陆器、上升器“四件套”组成。着陆器将在月表采集到的“宝藏”交给上升器,上升器从月面上升,与轨道器(含返回器)在太空“汇合”,返回器离开轨道器,返回地球。
国防科大载人航天任务规划与系统仿真课题组针对上升器与轨道器(含返回器)的环月交会对接任务,展开科研攻关,研制了相关模型和软件,为成功完成“太空之吻”提供技术支撑。这样意义重大的任务对团队成员来说“驾轻就熟”,此前“神八”和“天宫一号”的历史性对接,以及“神九”和“天宫一号”完成的首次载人交会对接,其交会对接飞行任务规划系统,均出自他们之手。
为嫦五安全着陆提供支撑
发射段和回收段是航天中最惊险、最可能出故障的阶段,降落伞回收系统又是动力学中最复杂的系统,地面上空十公里以内的风变化非常频繁,不确定因素极多,不仅要找出哪块出了问题,还要不断做空投验证,其过程反反复复,极其磨人。
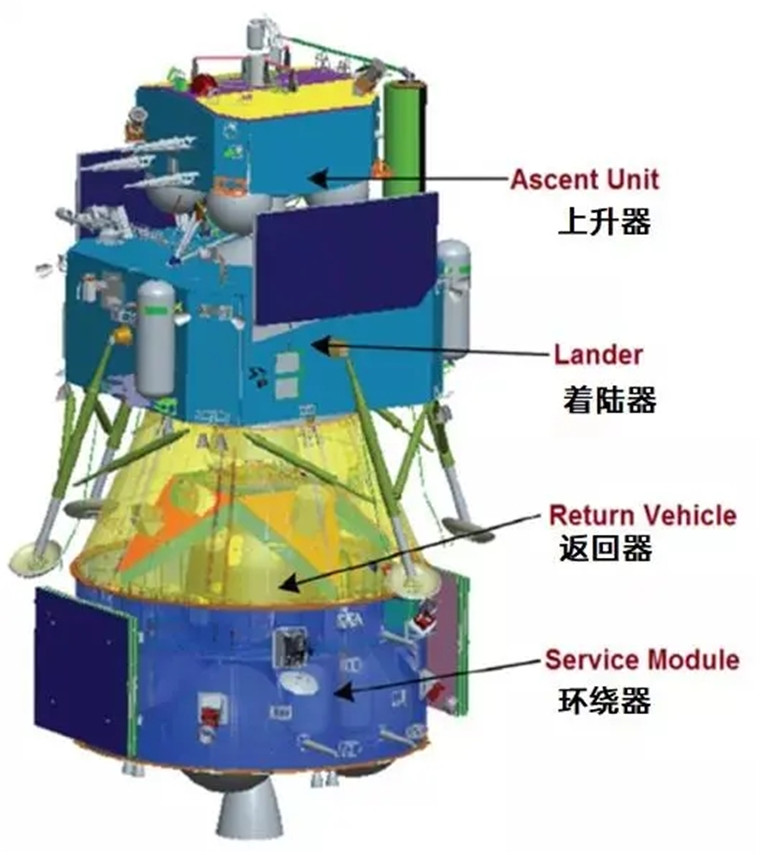
针对嫦娥五号网格化搜救任务的需求,自2020年7月以来张青斌研究员带领的团队,反复进行模型校核分析,研究着发射场历年风场特征和降落伞回收系统的多项不确定性因素,建立“嫦娥五号”降落伞回收系统不确定性条件下的快速分析模型。这套软件将首次应用于“嫦娥五号”的搜索回收任务,通过对返回器开伞后飞行轨迹的偏差分析,预测返回器的飞行管道,为搜救力量提供精确、详细的引导信息。
项目组仿真计算的飞行管道
2011年,团队承担了嫦娥五号降落伞回收分系统的设计仿真研究工作;今年又承担了“嫦娥五号”返回器降落伞减速阶段的飞行管道计算与落点预报工作,为返回器的搜救任务提供了技术支撑。
